AMPM Gem5 Codes
1. 成员变量
AMPMPrefetcher里面的主要成员变量是AccessMapPatternMatching
AccessMapPatternMatching的主要成员变量有
1.1. Access Map Table
每个entry对应一个cache line的状态机
struct AccessMapEntry : public TaggedEntry {
/** vector containing the state of the cachelines in this zone */
std::vector<AccessMapState> states;
AccessMapEntry(size_t num_entries)
: TaggedEntry(), states(num_entries, AM_INIT) {}
void
invalidate() override
{
TaggedEntry::invalidate();
for (auto &entry : states) {
entry = AM_INIT;
}
}
};
/** Access map table */
AssociativeSet<AccessMapEntry> accessMapTable;
其中每个cache line状态机可能处于如下几种状态
/** Data type representing the state of a cacheline in the access map */
enum AccessMapState {
AM_INIT,
AM_PREFETCH,
AM_ACCESS,
AM_INVALID
};
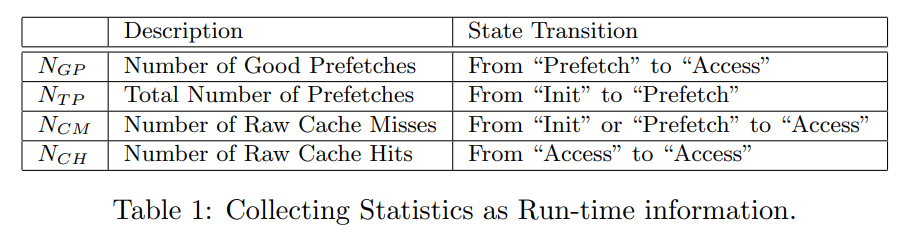
1.2. 一些统计指标
/**
* Number of good prefetches
* - State transitions from PREFETCH to ACCESS
*/
uint64_t numGoodPrefetches;
/**
* Number of prefetches issued
* - State transitions from INIT to PREFETCH
*/
uint64_t numTotalPrefetches;
/**
* Number of raw cache misses
* - State transitions from INIT or PREFETCH to ACCESS
*/
uint64_t numRawCacheMisses;
/**
* Number of raw cache hits
* - State transitions from ACCESS to ACCESS
*/
uint64_t numRawCacheHits;
/** Current degree */
unsigned degree;
/** Current useful degree */
unsigned usefulDegree;
对应论文里
1.3. 一些常量
大部分是用于prefetcher throttling的
/** Cacheline size used by the prefetcher using this object */
const unsigned blkSize;
/** Limit the stride checking to -limitStride/+limitStride */
const unsigned limitStride;
/** Maximum number of prefetch generated */
const unsigned startDegree;
/** Amount of memory covered by a hot zone */
const uint64_t hotZoneSize;
/** A prefetch coverage factor bigger than this is considered high */
const double highCoverageThreshold;
/** A prefetch coverage factor smaller than this is considered low */
const double lowCoverageThreshold;
/** A prefetch accuracy factor bigger than this is considered high */
const double highAccuracyThreshold;
/** A prefetch accuracy factor smaller than this is considered low */
const double lowAccuracyThreshold;
/** A cache hit ratio bigger than this is considered high */
const double highCacheHitThreshold;
/** A cache hit ratio smaller than this is considered low */
const double lowCacheHitThreshold;
/** Cycles in an epoch period */
const Cycles epochCycles;
/** Off chip memory latency to use for the epoch bandwidth calculation */
const Tick offChipMemoryLatency;
2. 成员函数
2.1. get access map entry
获取当前request addr的zone, 以及前后相邻的两个zone
// Get the entries of the curent block (am_addr), the previous, and the
// following ones
AccessMapEntry *am_entry_curr = getAccessMapEntry(am_addr, is_secure);
AccessMapEntry *am_entry_prev = (am_addr > 0) ?
getAccessMapEntry(am_addr-1, is_secure) : nullptr;
AccessMapEntry *am_entry_next = (am_addr < (MaxAddr/hotZoneSize)) ?
getAccessMapEntry(am_addr+1, is_secure) : nullptr;
assert(am_entry_curr != am_entry_prev);
assert(am_entry_curr != am_entry_next);
assert(am_entry_prev != am_entry_next);
assert(am_entry_curr != nullptr);
其中getAccessMapEntry函数如下: 找到就返回结果,没有找到就进行替换
AccessMapPatternMatching::AccessMapEntry *
AccessMapPatternMatching::getAccessMapEntry(Addr am_addr,
bool is_secure)
{
AccessMapEntry *am_entry = accessMapTable.findEntry(am_addr, is_secure);
if (am_entry != nullptr) {
accessMapTable.accessEntry(am_entry);
} else {
am_entry = accessMapTable.findVictim(am_addr);
assert(am_entry != nullptr);
accessMapTable.insertEntry(am_addr, is_secure, am_entry);
}
return am_entry;
}
2.2. set entry state
将当前访问zone am_entry_curr 的cache line的状态设置为AM_ACCESS, 更新一些统计信息
//Mark the current access as Accessed
setEntryState(*am_entry_curr, current_block, AM_ACCESS);
其中setEntryState函数如下所示
void
AccessMapPatternMatching::setEntryState(AccessMapEntry &entry,
Addr block, enum AccessMapState state) {
enum AccessMapState old = entry.states[block];
entry.states[block] = state;
//do not update stats when initializing
if (state == AM_INIT) return;
switch (old) {
case AM_INIT:
if (state == AM_PREFETCH) {
numTotalPrefetches += 1;
} else if (state == AM_ACCESS) {
numRawCacheMisses += 1;
}
break;
case AM_PREFETCH:
if (state == AM_ACCESS) {
numGoodPrefetches += 1;
numRawCacheMisses += 1;
}
break;
case AM_ACCESS:
if (state == AM_ACCESS) {
numRawCacheHits += 1;
}
break;
default:
panic("Impossible path\n");
break;
}
}
2.3. issue prefetch requests
先做了一些处理工作,将3个zone的cache line合并到一个vector里面
/**
* Create a contiguous copy of the 3 entries states.
* With this, we avoid doing boundaries checking in the loop that looks
* for prefetch candidates, mark out of range positions with AM_INVALID
*/
std::vector<AccessMapState> states(3 * lines_per_zone);
for (unsigned idx = 0; idx < lines_per_zone; idx += 1) {
states[idx] =
am_entry_prev != nullptr ? am_entry_prev->states[idx] : AM_INVALID;
states[idx + lines_per_zone] = am_entry_curr->states[idx];
states[idx + 2 * lines_per_zone] =
am_entry_next != nullptr ? am_entry_next->states[idx] : AM_INVALID;
}
然后对可能的stride做了一个遍历
for (int stride = 1; stride < max_stride; stride += 1) {
...
}
在loop里面会对+stride的可能性和-stride的可能性做一次检查
下面整个是-stride的一段代码
- 先check当前stride是否符合要求(+stride以及+2stride被访问过或者+stride以及+2stride+1被访问过)
- stride符合要求的情况下,更新map,计算pf addr
- 如果stride > current_block, 那么current_block-stride会落到prev zone, 计算的时候需要注意一下
// Test accessed positive strides
if (checkCandidate(states, states_current_block, stride)) {
// candidate found, current_block - stride
Addr pf_addr;
if (stride > current_block) {
// The index (current_block - stride) falls in the range of
// the previous zone (am_entry_prev), adjust the address
// accordingly
Addr blk = states_current_block - stride;
pf_addr = (am_addr - 1) * hotZoneSize + blk * blkSize;
setEntryState(*am_entry_prev, blk, AM_PREFETCH);
} else {
// The index (current_block - stride) falls within
// am_entry_curr
Addr blk = current_block - stride;
pf_addr = am_addr * hotZoneSize + blk * blkSize;
setEntryState(*am_entry_curr, blk, AM_PREFETCH);
}
addresses.push_backAddrPriority(pf_addr, 0);
if (addresses.size() == degree) {
break;
}
}
其中checkCandidate函数如下
Note
注意target是current - stride不是current + stride
/**
* Given a target cacheline, this function checks if the cachelines
* that follow the provided stride have been accessed. If so, the line
* is considered a good candidate.
* @param states vector containing the states of three contiguous hot zones
* @param current target block (cacheline)
* @param stride access stride to obtain the reference cachelines
* @return true if current is a prefetch candidate
*/
inline bool checkCandidate(std::vector<AccessMapState> const &states,
Addr current, int stride) const
{
enum AccessMapState tgt = states[current - stride];
enum AccessMapState s = states[current + stride];
enum AccessMapState s2 = states[current + 2 * stride];
enum AccessMapState s2_p1 = states[current + 2 * stride + 1];
return (tgt != AM_INVALID &&
((s == AM_ACCESS && s2 == AM_ACCESS) ||
(s == AM_ACCESS && s2_p1 == AM_ACCESS)));
}
2.4. throttling
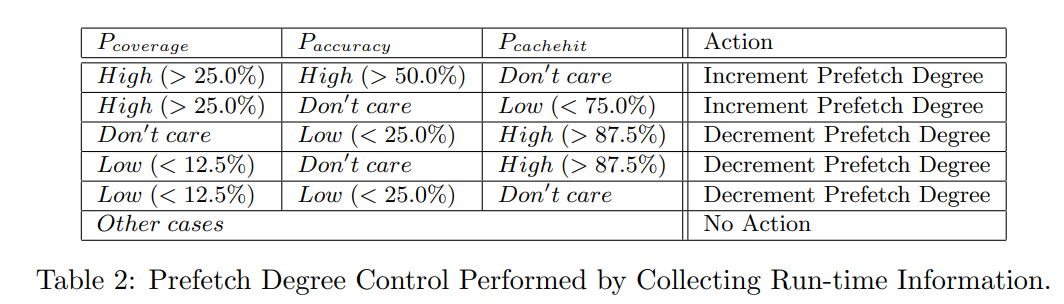
void
AccessMapPatternMatching::processEpochEvent()
{
schedule(epochEvent, clockEdge(epochCycles));
double prefetch_accuracy =
((double) numGoodPrefetches) / ((double) numTotalPrefetches);
double prefetch_coverage =
((double) numGoodPrefetches) / ((double) numRawCacheMisses);
double cache_hit_ratio = ((double) numRawCacheHits) /
((double) (numRawCacheHits + numRawCacheMisses));
double num_requests = (double) (numRawCacheMisses - numGoodPrefetches +
numTotalPrefetches);
double memory_bandwidth = num_requests * offChipMemoryLatency /
cyclesToTicks(epochCycles);
if (prefetch_coverage > highCoverageThreshold &&
(prefetch_accuracy > highAccuracyThreshold ||
cache_hit_ratio < lowCacheHitThreshold)) {
usefulDegree += 1;
} else if ((prefetch_coverage < lowCoverageThreshold &&
(prefetch_accuracy < lowAccuracyThreshold ||
cache_hit_ratio > highCacheHitThreshold)) ||
(prefetch_accuracy < lowAccuracyThreshold &&
cache_hit_ratio > highCacheHitThreshold)) {
usefulDegree -= 1;
}
degree = std::min((unsigned) memory_bandwidth, usefulDegree);
// reset epoch stats
numGoodPrefetches = 0.0;
numTotalPrefetches = 0.0;
numRawCacheMisses = 0.0;
numRawCacheHits = 0.0;
}