DSPatch Codes
成员变量
几大组成部分
- Page Buffer (PB)
- Signature Prediction Table (SPT)
deque<DSPatch_PBEntry*> page_buffer;
DSPatch_SPTEntry **spt;
1. PB

class DSPatch_PBEntry {
public:
uint64_t page; // page number
uint64_t trigger_pc;
uint32_t trigger_offset;
Bitmap bmp_real; // observed bit pattern
...
};
2. SPT
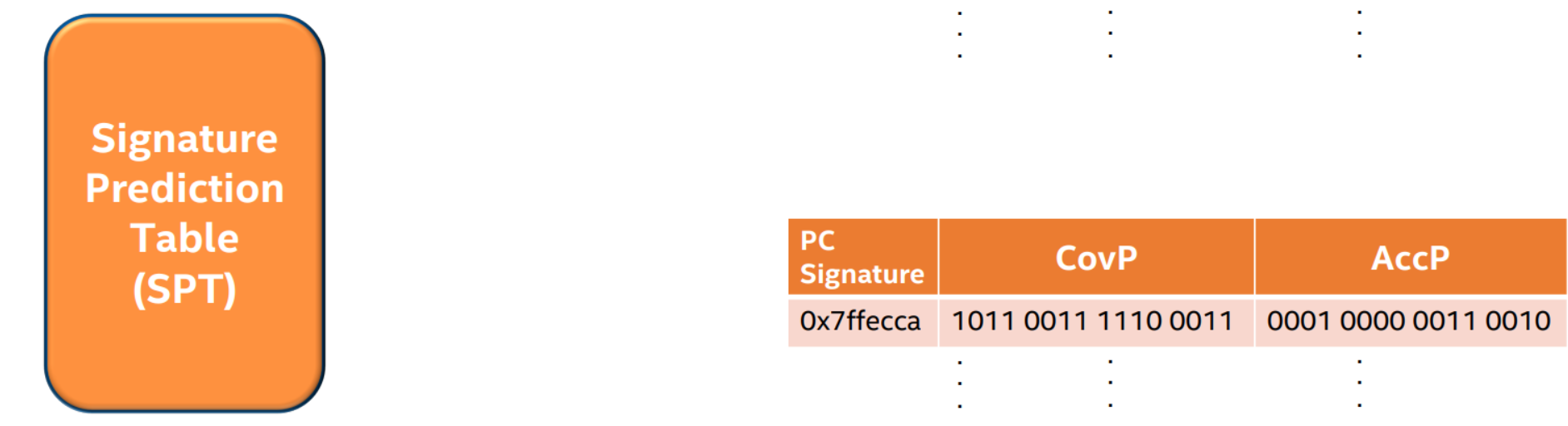
class DSPatch_SPTEntry {
public:
uint64_t signature;
Bitmap bmp_cov;
Bitmap bmp_acc;
DSPatch_counter measure_covP, measure_accP;
DSPatch_counter or_count;
...
};
成员函数
入口函数为invoke_prefetcher
主要过程
- Learning memory access patterns
- 找到PB entry
- 记录新的访问pattern
- 没有找到的话需要生成新的PB entry。如果PB entry满了的话要evict到SPT里面
- Generate Prefetches
- 访问SPT
- 根据DRAM bandwidth选择AccP, CovP,获得candidate
- issue prefetch
void DSPatch::invoke_prefetcher(uint64_t pc, uint64_t address, uint8_t cache_hit, uint8_t type, vector<uint64_t> &pref_addr)
{
uint64_t page = address >> knob::dspatch_log2_region_size;
uint32_t offset = (address >> LOG2_BLOCK_SIZE) & ((1ull << dspatch_log2_region_size - LOG2_BLOCK_SIZE)) - 1;
DSPatch_PBEntry *pbentry = NULL;
pbentry = search_pb(page);
if(pbentry) {
/* record the access */
pbentry->bmp_real[offset] = true;
}
else { /* page buffer miss, prefetch trigger opportunity */
/* insert the new page buffer entry */
if(page_buffer.size() >= knob::dspatch_pb_size) {
pbentry = page_buffer.front();
page_buffer.pop_front();
add_to_spt(pbentry);
delete pbentry;
}
pbentry = new DSPatch_PBEntry();
pbentry->page = page;
pbentry->trigger_pc = pc;
pbentry->trigger_offset = offset;
pbentry->bmp_real[offset] = true;
page_buffer.push_back(pbentry);
stats.pb.insert++;
/* trigger prefetch */
generate_prefetch(pc, page, offset, address, pref_addr);
ifdspatch_enable_pref_buffer {
buffer_prefetch(pref_addr);
pref_addr.clear();
}
}
/* slowly inject prefetches at every demand access, if buffer is turned on */
ifdspatch_enable_pref_buffer
issue_prefetch(pref_addr);
}
1. Learning memory access patterns
i. 找到PB entry
DSPatch_PBEntry *pbentry = NULL;
pbentry = search_pb(page);
主要是这个search_pb函数
就是根据当前的page number找到匹配的PB entry
DSPatch_PBEntry* DSPatch::search_pb(uint64_t page) {
auto it = find_if(page_buffer.begin(), page_buffer.end(), [page](DSPatch_PBEntry *pbentry){return pbentry->page == page;});
return it != page_buffer.end() ? (*it) : NULL;
}
ii. 记录新的访问pattern
在PB entry的bmp_real记录当前offset的访问为true
if(pbentry)
/* record the access */
pbentry->bmp_real[offset] = true;
iii. 没有找到的话需要生成新的PB entry。如果PB entry满了的话要evict到SPT里面
// 如果PB满了,evict到SPT
if(page_buffer.size() >= knob::dspatch_pb_size) {
pbentry = page_buffer.front();
page_buffer.pop_front();
add_to_spt(pbentry);
delete pbentry;
}
// 设置新的PB entry的内容, 插入PB
pbentry = new DSPatch_PBEntry();
pbentry->page = page;
pbentry->trigger_pc = pc;
pbentry->trigger_offset = offset;
pbentry->bmp_real[offset] = true;
page_buffer.push_back(pbentry);
我们主要看一下PB满了的话,如果evict到SPT中,主要是add_to_spt函数。这个函数应该是代码的重头戏了
void DSPatch::add_to_spt(DSPatch_PBEntry *pbentry)
{
stats.spt.called++;
Bitmap bmp_real, bmp_cov, bmp_acc;
bmp_real = pbentry->bmp_real;
uint64_t trigger_pc = pbentry->trigger_pc;
uint32_t trigger_offset = pbentry->trigger_offset;
uint64_t signature = create_signature(trigger_pc, 0xdeadbeef, trigger_offset);
uint32_t spt_index = get_spt_index(signature);
assert(spt_index < knob::dspatch_num_spt_entries);
DSPatch_SPTEntry *sptentry = spt[spt_index];
bmp_real = BitmapHelper::rotate_right(bmp_real, trigger_offset, knob::dspatch_num_cachelines_in_region);
bmp_cov = BitmapHelper::decompress(sptentry->bmp_cov, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region);
bmp_acc = BitmapHelper::decompress(sptentry->bmp_acc, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region);
uint32_t pop_count_bmp_real = BitmapHelper::count_bits_set(bmp_real);
uint32_t pop_count_bmp_cov = BitmapHelper::count_bits_set(bmp_cov);
uint32_t pop_count_bmp_acc = BitmapHelper::count_bits_set(bmp_acc);
uint32_t same_count_bmp_cov = BitmapHelper::count_bits_same(bmp_cov, bmp_real);
uint32_t same_count_bmp_acc = BitmapHelper::count_bits_same(bmp_acc, bmp_real);
uint32_t cov_bmp_cov = 100 * (float)same_count_bmp_cov / pop_count_bmp_real;
uint32_t acc_bmp_cov = 100 * (float)same_count_bmp_cov / pop_count_bmp_cov;
uint32_t cov_bmp_acc = 100 * (float)same_count_bmp_acc / pop_count_bmp_real;
uint32_t acc_bmp_acc = 100 * (float)same_count_bmp_acc / pop_count_bmp_acc;
/* Update CovP counters */
ifcount_bits_diff(bmp_real, bmp_cov) != 0
sptentry->or_count.incrdspatch_or_count_max;
if(acc_bmp_cov < knob::dspatch_acc_thr || cov_bmp_cov < knob::dspatch_cov_thr)
sptentry->measure_covP.incrdspatch_measure_covP_max;
/* Update CovP */
if(sptentry->measure_covP.value() == knob::dspatch_measure_covP_max) {
if(bw_bucket == 3 || cov_bmp_cov < 50) { /* WARNING: hardcoded values */
sptentry->bmp_cov = BitmapHelper::compress(bmp_real, knob::dspatch_compression_granularity);
sptentry->or_count.reset();
stats.spt.bmp_cov_reset++;
}
}
else
{
sptentry->bmp_cov = BitmapHelper::compressbitwise_or(bmp_cov, bmp_real), knob::dspatch_compression_granularity;
}
/* Update AccP counter(s) */
if(acc_bmp_acc < 50) /* WARNING: hardcoded value */
sptentry->measure_accP.incr();
else
sptentry->measure_accP.decr();
/* Update AccP */
sptentry->bmp_acc = BitmapHelper::bitwise_and(bmp_real, BitmapHelper::decompress(sptentry->bmp_cov, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region));
sptentry->bmp_acc = BitmapHelper::compress(sptentry->bmp_acc, knob::dspatch_compression_granularity);
}
我们拆解这段代码,主要是一下几个步骤
- 找到SPT entry
- 获取bmp_real, bmp_cov, bmp_acc, 进行一系列计算
- 更新CovP
- 更新AccP
a. 找到SPT entry
其实是用pc作为signature的
uint64_t signature = create_signature(trigger_pc, 0xdeadbeef, trigger_offset);
uint32_t spt_index = get_spt_index(signature);
// DSPatch organizes the SPT as a 256-entry tagless direct-mapped structure. A simple folded-XOR hash of the PC is used to index into this structure.
uint32_t DSPatch::get_spt_index(uint64_t signature) {
uint32_t folded_sig = folded_xor(signature, 2);
uint32_t hashed_index = get_hash(folded_sig);
return hashed_index % knob::dspatch_num_spt_entries;
}
b. 获取bmp_real, bmp_cov, bmp_acc, 进行一系列计算
bmp_real = pbentry->bmp_real;
// bmp_real先根据trigger_offset进行anchor
bmp_real = BitmapHelper::rotate_right(bmp_real, trigger_offset, knob::dspatch_num_cachelines_in_region);
// 将bmp_cov, bmp_acc解压出来
bmp_cov = BitmapHelper::decompress(sptentry->bmp_cov, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region);
bmp_acc = BitmapHelper::decompress(sptentry->bmp_acc, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region);
// 看各个里面set为true的有多少,重合的有多少
uint32_t pop_count_bmp_real = BitmapHelper::count_bits_set(bmp_real);
uint32_t pop_count_bmp_cov = BitmapHelper::count_bits_set(bmp_cov);
uint32_t pop_count_bmp_acc = BitmapHelper::count_bits_set(bmp_acc);
uint32_t same_count_bmp_cov = BitmapHelper::count_bits_same(bmp_cov, bmp_real);
uint32_t same_count_bmp_acc = BitmapHelper::count_bits_same(bmp_acc, bmp_real);
// 计算spt entry里面的cov和acc
uint32_t cov_bmp_cov = 100 * (float)same_count_bmp_cov / pop_count_bmp_real;
uint32_t acc_bmp_cov = 100 * (float)same_count_bmp_cov / pop_count_bmp_cov;
uint32_t cov_bmp_acc = 100 * (float)same_count_bmp_acc / pop_count_bmp_real;
uint32_t acc_bmp_acc = 100 * (float)same_count_bmp_acc / pop_count_bmp_acc;
c. 更新CovP counter
/* Update CovP counters */
/** OrCount is incremented every time the OR
* operationadds any bits to the predicted bit-pattern.
*/
ifcount_bits_diff(bmp_real, bmp_cov) != 0
sptentry->or_count.incrdspatch_or_count_max;
/** employ a 2b counter called MeasureCovP
* to quantify the goodness of CovP (越大说明CovP越不好)
* Measure CovP is incremented in two cases:
* (1) if the CovP prediction accuracy is less than a threshold value (called AccThr )
* (2) if the prefetch coverage from CoP is less than a thresholdvalue (called CovThr )
*/
if(acc_bmp_cov < knob::dspatch_acc_thr || cov_bmp_cov < knob::dspatch_cov_thr)
sptentry->measure_covP.incrdspatch_measure_covP_max;
/* Update CovP */
/**DSPatch resets CovP to the current program bit-pattern when Measure CovP
* is saturated and either of the two following conditions are satisfied:
* (1) current memory bandwidth utilization is in the highest quartile
* (2) prefetch coverage is less than 50%
*/
if(sptentry->measure_covP.value() == knob::dspatch_measure_covP_max) {
if(bw_bucket == 3 || cov_bmp_cov < 50) { /* WARNING: hardcoded values */
sptentry->bmp_cov = BitmapHelper::compress(bmp_real, knob::dspatch_compression_granularity);
sptentry->or_count.reset();
stats.spt.bmp_cov_reset++;
}
}
else {
// 将bmp_real encode到bmp_cov, 更新
sptentry->bmp_cov = BitmapHelper::compressbitwise_or(bmp_cov, bmp_real), knob::dspatch_compression_granularity;
}
d. 更新AccP counter
// use a 2b counter called MeasureAccP to quantify the goodness of AccP
/**MeasureAccP is incremented if AccP prediction accuracy is less than 50%,
* and is decremented otherwise.
*/
if(acc_bmp_acc < 50)
sptentry->measure_accP.incr();
else
sptentry->measure_accP.decr();
sptentry->bmp_acc = BitmapHelper::bitwise_and(bmp_real, BitmapHelper::decompress(sptentry->bmp_cov, dspatch_compression_granularity, dspatch_num_cachelines_in_region));
sptentry->bmp_acc = BitmapHelper::compress(sptentry->bmp_acc, dspatch_compression_granularity);
2. Generate Prefetches
/* trigger prefetch */
generate_prefetch(pc, page, offset, address, pref_addr);
generate_prefetch函数的内容
void DSPatch::generate_prefetch(uint64_t pc, uint64_t page, uint32_t offset, uint64_t address, vector<uint64_t> &pref_addr)
{
Bitmap bmp_cov, bmp_acc, bmp_pred;
uint64_t signature = 0xdeadbeef;
DSPatch_pref_candidate candidate = DSPatch_pref_candidate::PAT_NONE;
DSPatch_SPTEntry *sptentry = NULL;
stats.gen_pref.called++;
signature = create_signature(pc, page, offset);
uint32_t spt_index = get_spt_index(signature);
assert(spt_index < knob::dspatch_num_spt_entries);
sptentry = spt[spt_index];
candidate = select_bitmap(sptentry, bmp_pred);
/* decompress and rotate back the bitmap */
bmp_pred = BitmapHelper::decompress(bmp_pred, knob::dspatch_compression_granularity, knob::dspatch_num_cachelines_in_region);
bmp_pred = BitmapHelper::rotate_left(bmp_pred, offset, knob::dspatch_num_cachelines_in_region);
/* Throttling predictions incase of predicting with bmp_acc and b/w is high */
if(bw_bucket >= knob::dspatch_pred_throttle_bw_thr && candidate == DSPatch_pref_candidate::PAT_ACCP)
bmp_pred.reset();
/* generate prefetch requests */
for(uint32_t index = 0; index < knob::dspatch_num_cachelines_in_region; ++index)
{
if(bmp_pred[index] && index != offset)
{
uint64_t addr = (page << knob::dspatch_log2_region_size) + (index << LOG2_BLOCK_SIZE);
pref_addr.push_back(addr);
}
}
}
i. 访问SPT
signature = create_signature(pc, page, offset);
uint32_t spt_index = get_spt_index(signature);
ii. 根据DRAM bandwidth选择AccP, CovP,获得candidate
sptentry = spt[spt_index];
candidate = select_bitmap(sptentry, bmp_pred);
主要是select_bitmap这个函数, select_bitmap 函数里面主要是dyn_selection函数,对应了论文中的选择过程。最后获得的bit pattern以bmp_pred返回
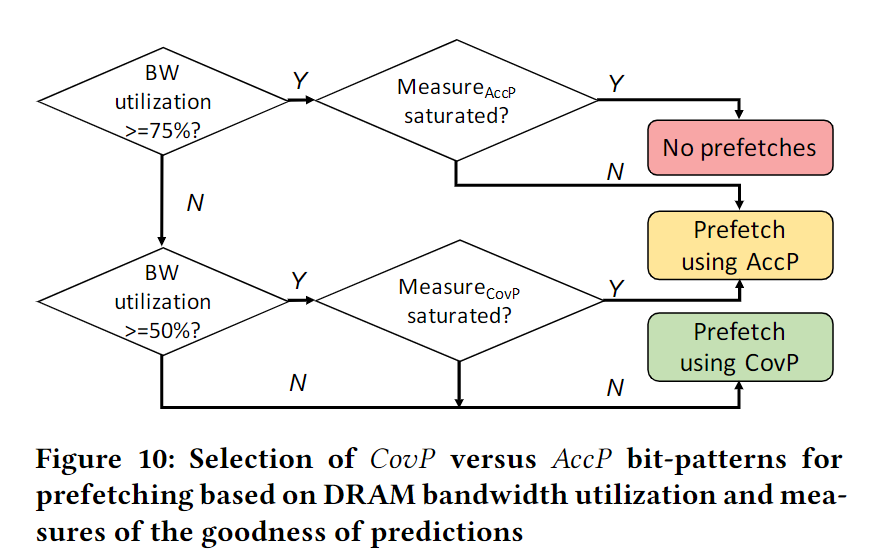
DSPatch_pref_candidate DSPatch::dyn_selection(DSPatch_SPTEntry *sptentry, Bitmap &bmp_selected) {
DSPatch_pref_candidate candidate = DSPatch_pref_candidate::PAT_NONE;
if(bw_bucket == 3) {
if(sptentry->measure_accP.value() == dspatch_measure_accP_max) {
/* no prefetch */
bmp_selected.reset();
candidate = DSPatch_pref_candidate::PAT_NONE;
} else {
/* Prefetch with accP */
bmp_selected = sptentry->bmp_acc;
candidate = DSPatch_pref_candidate::PAT_ACCP;
}
} else if(bw_bucket == 2) {
if(sptentry->measure_covP.value() == dspatch_measure_covP_max) {
/* Prefetch with accP */
bmp_selected = sptentry->bmp_acc;
candidate = DSPatch_pref_candidate::PAT_ACCP;
} else {
/* Prefetch with covP */
bmp_selected = sptentry->bmp_cov;
candidate = DSPatch_pref_candidate::PAT_COVP;
}
} else {
/* Prefetch with covP */
bmp_selected = sptentry->bmp_cov;
candidate = DSPatch_pref_candidate::PAT_COVP;
}
return candidate;
}
iii. issue prefetch
// 将bmp_pred解压缩,anchor回来
bmp_pred = BitmapHelper::decompress(bmp_pred, dspatch_compression_granularity, dspatch_num_cachelines_in_region);
bmp_pred = BitmapHelper::rotate_left(bmp_pred, offset, dspatch_num_cachelines_in_region);
/* Throttling predictions incase of predicting with bmp_acc and b/w is high */
if(bw_bucket >= dspatch_pred_throttle_bw_thr && candidate == DSPatch_pref_candidate::PAT_ACCP) {
bmp_pred.reset();
}
/* generate prefetch requests */
for(uint32_t index = 0; index < dspatch_num_cachelines_in_region; ++index){
if(bmp_pred[index] && index != offset){
Addr addr = (page << dspatch_log2_region_size) + (index << 6); //blkSize
addresses.push_back(AddrPriority(addr, 0));
}
}